Chromium Mojo & IPC
这篇文章来自我的一个开源项目,建议配合项目中的源码来辅助理解。项目地址: keyou/chromium_demo: A series of demos to show how chromium is constructed.
Mojo 是一个跨平台 IPC 框架,它诞生于 chromium ,用来实现 chromium 进程内/进程间的通信。目前,它也被用于 ChromeOS。
一、Mojo 的分层
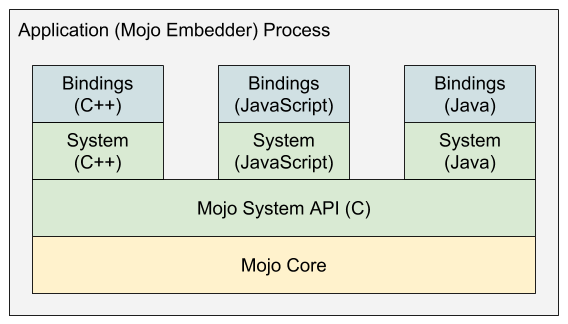
从图中看 Mojo 分4层:
Mojo Core: Mojo 的实现层,不能独立使用,由 C++ 实现;Mojo System API(C): Mojo 的 C API 层,它和 Mojo Core 对接,可以在程序中独立使用;Mojo System API(C++/Java/JS): Mojo 的各种语言包装层,它将 Mojo C API 包装成多种语言的库,让其他语言可以使用。这一层也可以在程序中独立使用;Mojo Bindings: 这一层引入一种称为Mojom的 IDL(接口定义)语言,通过它可以定义通信接口,这些接口会生成接口类,使用户只要实现这些接口就可以使用 Mojo 进行通信,这一层使得IPC两端不需要通过原始字节流进行通信,而是通过接口进行通信,有点类似 Protobuf 和 Thrift 。
除了上面提到的那些层之外,在 Chromium 中还有2个模块对 Mojo 进行了包装,分别是 Services(//services) 模块和 IPC(//ipc) 模块。
Services: 一种更高层次的IPC机制,构建于Mojo之上,以Service的级别来进行IPC通信,Chromium大量使用这种IPC机制来包装各种服务,用来取代Legacy Chrome IPC,比如device服务,preferences服务,audio服务,viz服务等。Legacy Chrome IPC: 已经不推荐使用的Chrome IPC机制,提供IPC::Channel接口以及大量的使用宏来定义的 messages 类。目前它底层也是基于 Mojo 来实现的,但是上层接口和旧的 Chrome IPC 保持一致。chromium 中还有很多IPC使用这种方式,但是不应该在新的服务中使用这种机制。可以在ipc/ipc_message_start.h中查看还有哪些部分在使用这种IPC机制。
Mojo 在Chromium中的分层
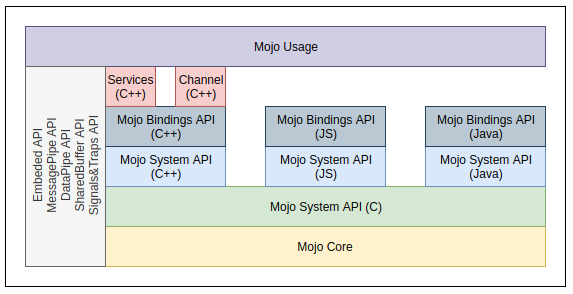
在Chromium中,还有两个基础模块使用Mojo,分别是Services和IPC::Channel。
二、Mojo 的设计
在使用 Mojo 之前,先来看一下 Mojo 的设计,这对理解后面的使用至关重要。
Mojo 支持在多个进程之间互相通信,这一点和其他的IPC有很大不同,其他大多只支持2个进程之间进行通信。由Mojo组成的这些可以互相通信的进程就形成了一个网络,在这个网络内的任意两个进程都可以进行通信,并且每个进程只能处于一个Mojo网络中,在这个网络内每一个进程内部有且只有一个Node,每一个Node可以提供多个Port,每个Port对应一种服务,这点类似TCP/IP中的IP地址和端口的关系。一个Node:Port对可以唯一确定一个服务。Node和Node之间通过Channel来实现通信,在不同平台上Channel有不同的实现方式,在Linux上是domain socket,在windows上是name pipe,在MAC OS平台上是 Mach Port。在Port上一层,Mojo封装了3个“应用层协议”,分别为MessagePipe,DataPipe和SharedBuffer(类似在TCP上封装了HTTP,SMTP等)。整体结构如下图:
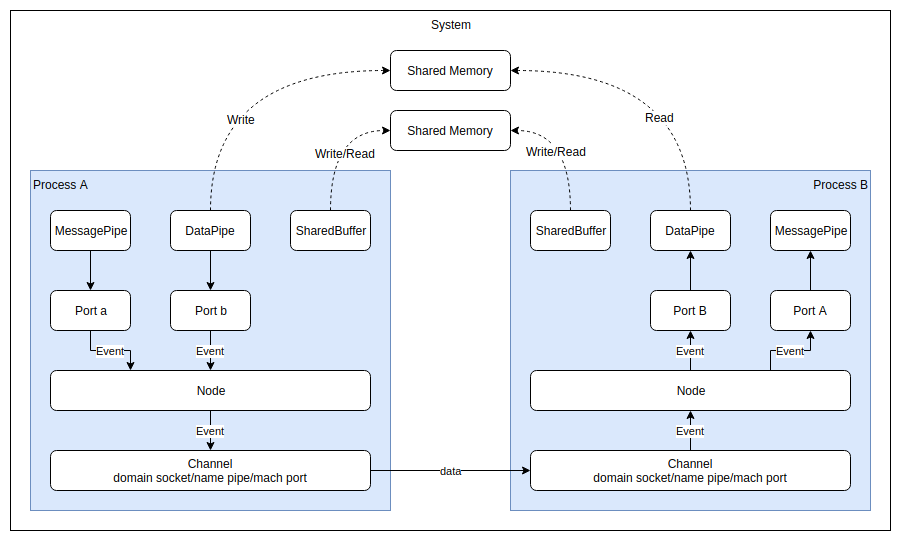
上图展示了在两个进程间使用Mojo的数据流。它有以下几个特点:
Channel: Mojo内部的实现细节,对外不可见,用于包装系统底层的通信通道,在Linux下是domain socket,Windows下是name pipe,MAC OS下是mach port;Node: 每个进程只有一个Node,它在Mojo中的作用相当于TCP/IP中的IP地址,同样是内部实现细节,对外不可见;Port: 每个进程可以有上百万个Port,它在Mojo中的作用相当于TCP/IP中的端口,同样是内部实现细节,对外不可见,每个Port都必定会对应一种应用层接口,目前Mojo支持三种应用层接口;MessagePipe: 应用层接口,用于进程间的双向通信,类似UDP,消息是基于数据报的,底层使用Channel通道;DataPipe: 应用层接口,用于进程间单向块数据传递,类似TCP,消息是基于数据流的,底层使用系统的Shared Memory实现;SharedBuffer: 应用层接口,支持双向块数据传递,底层使用系统Shared Memory实现;MojoHandle: 所有的 MessagePipe,DataPipe,SharedBuffer 都使用MojoHandle来包装,有了这个Handle就可以对它们进行读写操作。还可以通过MessagePipe将MojoHandle发送到网络中的任意进程。PlatformHandle: 用来包装系统的句柄或文件描述符,可以将它转换为MojoHandle然后发送到网络中的任意进程。
MessagePipe
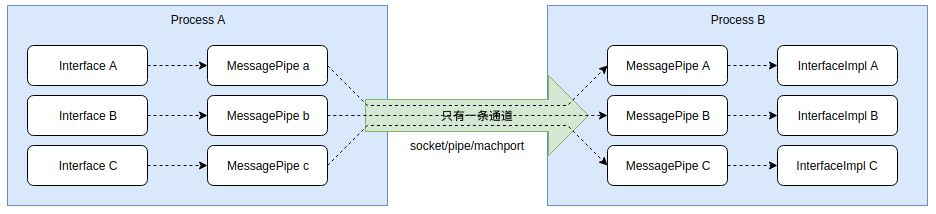
一个进程中可以有N多个MessagePipe,所有的MessagePipe都共享底层的一条通信通道,就像下图这样:
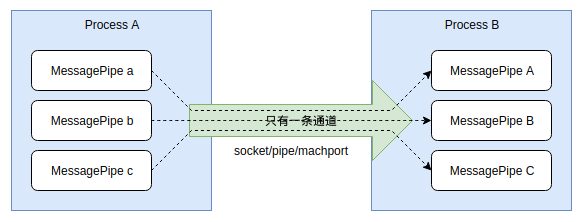
Mojo保证同一个MessagePipe中数据的发送顺序和接收顺序一致,但是不保证多个MessagePipe之间的数据的有序。
Mojo 模糊了进程边界
需要特别说明的是,Mojo不是只能在不同进程间使用,它从一开始就考虑了在单进程中使用的场景,并且有专门的优化,因此,使用Mojo带来的一个额外好处是,在Mojo的一端进行读写不必知道另一端是运行在当前进程还是外部进程,这非常有利于将单进程程序逐步的使用Mojo拆分为多进程程序,并且可以在调试的时候使用单进程方便调试,在正式环境中使用多进程缩小程序崩溃时的影响范围。
三、Mojo 的应用
Mojo 不仅可以在 Chromium 中使用,也可以在任何第三方程序中使用,因为它本身不依赖于 Chromium 中的业务逻辑部分。不过由于它的源码在 Chromium 中,在其他程序中使用可能没有那么方便。
Mojo提供了不同层次的API,外部可以根据自己的需要选择使用的层次,下面我们简单介绍每种API的使用方法,详细信息可以查看对应的demo程序。
目前 Mojo 支持 C++/Java/Js,这里只介绍C++相关用法。
初始化 Mojo
初始化Mojo有两种方式,一种适用于静态链接Mojo的程序,一种适用于动态链接Mojo的程序。以下是静态链接时的初始化方法,动态链接时只需要把mojo::core::Init()替换为MojoInitialize()即可。
初始化接口的头文件为:
#include <mojo/core/embedder/embedder.h>
#include <mojo/core/embedder/scoped_ipc_support.h>
初始化方法如下:
int main(int argc, char** argv) {
// 初始化CommandLine,DataPipe 依赖它
base::CommandLine::Init(argc, argv);
// 初始化 mojo
mojo::core::Init();
// 创建一个线程,用于Mojo内部收发数据
base::Thread ipc_thread("ipc!");
ipc_thread.StartWithOptions(
base::Thread::Options(base::MessageLoop::TYPE_IO, 0));
// 初始化 Mojo 的IPC支持,只有初始化后进程间的Mojo通信才能有效
// 这个对象要保证一直存活,否则IPC通信就会断开
mojo::core::ScopedIPCSupport ipc_support(
ipc_thread.task_runner(),
mojo::core::ScopedIPCSupport::ShutdownPolicy::CLEAN);
// ...
}
Mojo C API
Mojo C API 都比较简单,主要的头文件位于:
// SharedBuffer API
#include "mojo/public/c/system/buffer.h"
// DataPipe API
#include "mojo/public/c/system/data_pipe.h"
// MessagePipe API
#include "mojo/public/c/system/message_pipe.h"
以下是在单进程中使用 MessagePipe 发送和接收数据的方法:
// 使用 C 接口创建一条MessagePipe
// MessagePipe 只是一对数字,只用于ID标识,并不对应任何系统资源
// 因此可以非常快速,不可能失败的,创建大量的MessagePipe。
MojoHandle sender_handle, receiver_handle;
MojoResult result =
MojoCreateMessagePipe(NULL, &sender_handle, &receiver_handle);
DCHECK_EQ(result, MOJO_RESULT_OK);
// 使用 C 接口发送一条消息
{
// 创建一条 Message
MojoMessageHandle message;
result = MojoCreateMessage(nullptr, &message);
DCHECK_EQ(result, MOJO_RESULT_OK);
MojoAppendMessageDataOptions options;
options.struct_size = sizeof(options);
// 这个选项表示这条消息完整了,底层可以发送了
options.flags = MOJO_APPEND_MESSAGE_DATA_FLAG_COMMIT_SIZE;
void* buffer;
uint32_t buffer_size;
// 给 Message 填充数据
result = MojoAppendMessageData(message, 6, nullptr, 0, &options, &buffer,&buffer_size);
DCHECK_EQ(result, MOJO_RESULT_OK);
memcpy(buffer, "hello", 6);
LOG(INFO) << "send: " << (const char*)buffer;
// 发送 Message
result = MojoWriteMessage(sender_handle, message, nullptr);
DCHECK_EQ(result, MOJO_RESULT_OK);
}
// 使用 C 接口接收一条消息
{
MojoMessageHandle message;
MojoResult result = MojoReadMessage(receiver_handle, nullptr, &message);
DCHECK_EQ(result, MOJO_RESULT_OK);
void* buffer = NULL;
uint32_t num_bytes;
result = MojoGetMessageData(message, nullptr, &buffer, &num_bytes, nullptr,nullptr);
LOG(INFO) << "receive: " << (const char*)buffer;
}
其他关于 DataPipe 和 SharedBuffer 的使用方法都类似,由于实际项目中很少直接使用 C API,所以其使用方法在这里省略了。
demo 见 demo_mojo_single_process.cc .
Mojo C++ API
单进程
以下是在单进程中使用 MessagePipe 的方法,其中最重要的是要注意 mojo::MessagePipe pipe; 这一行(内部调用Mojo的C API MojoCreateMessagePipe),它创建了一个MessagePipe,本质上只是创建了一对随机数,对应pipe中的两个属性handle0和handle1,这两个功能上没有任何区别,向其中的一个handle写的数据可以从另一个handle中读取出来。
#include "mojo/public/cpp/system/buffer.h"
#include "mojo/public/cpp/system/data_pipe.h"
#include "mojo/public/cpp/system/message_pipe.h"
#include "mojo/public/cpp/system/simple_watcher.h"
#include "mojo/public/cpp/system/wait.h"
// 使用C++接口创建一条 MessagePipe
mojo::MessagePipe pipe;
// 使用 C++ 接口发送一条消息
{
const char kMessage[] = "HELLO";
result =
mojo::WriteMessageRaw(pipe.handle0.get(), kMessage, sizeof(kMessage),
nullptr, 0, MOJO_WRITE_MESSAGE_FLAG_NONE);
DCHECK_EQ(result, MOJO_RESULT_OK);
LOG(INFO) << "send: " << kMessage;
}
// 使用 C++ 接口接收一条消息
{
std::vector<uint8_t> data;
result = mojo::ReadMessageRaw(pipe.handle1.get(), &data, nullptr,
MOJO_READ_MESSAGE_FLAG_NONE);
DCHECK_EQ(result, MOJO_RESULT_OK);
LOG(INFO) << "receive msg: " << (char*)&data[0];
}
关于DataPipe和SharedBuffer的使用这里不再赘述,详见 demo_mojo_single_process.cc。
多进程
一个MessagePipe中有一对handle,分别是handle0和handle1,向其中一个handle写的数据可以从另外一个handle读出来,这是前面已经说过的,如果把其中的一个handle发送到另外一个进程,这一对handle之间依然能够相互收发数据。Mojo提供了多种方法来发送handle到其他的进程,其中最简单的是使用 Invitation。
要在多个进程间使用Mojo,必须先通过Invitation将这些进程“连接”起来,这需要一个进程发送Invitation,另一个进程接收Invitation,发送Invitation的方法如下:
// 创建一条系统级的IPC通信通道
// 在linux上是 domain socket, Windows 是 named pipe,MacOS是Mach Port,该通道用于支持跨进程的消息通信
mojo::PlatformChannel channel;
LOG(INFO) << "local: "
<< channel.local_endpoint().platform_handle().GetFD().get()
<< " remote: "
<< channel.remote_endpoint().platform_handle().GetFD().get();
mojo::OutgoingInvitation invitation;
// 创建1个Message Pipe用来和其他进程通信
// 这里的 pipe 就相当于单进程中的pipe.handle0
// handle1 会被存储在invitation中,随后被发送出去
// 可以多次调用,以便Attach多个MessagePipe到Invitation中
mojo::ScopedMessagePipeHandle pipe =
invitation.AttachMessagePipe("my raw pipe");
LOG(INFO) << "pipe: " << pipe->value();
base::LaunchOptions options;
base::CommandLine command_line(
base::CommandLine::ForCurrentProcess()->GetProgram());
// 将PlatformChannel中的RemoteEndpoint的fd作为参数传递给子进程
// 在posix中,fd会被复制到新的随机的fd,fd号改变
// 在windows中,fd被复制后会直接进行传递,fd号不变
channel.PrepareToPassRemoteEndpoint(&options, &command_line);
// 启动新进程
base::Process child_process = base::LaunchProcess(command_line, options);
channel.RemoteProcessLaunchAttempted();
// 发送Invitation
mojo::OutgoingInvitation::Send(
std::move(invitation), child_process.Handle(),
channel.TakeLocalEndpoint(),
base::BindRepeating(
[](const std::string& error) { LOG(ERROR) << error; }));
在新进程中接收Invitation的方法如下:
// Accept an invitation.
mojo::IncomingInvitation invitation = mojo::IncomingInvitation::Accept(
mojo::PlatformChannel::RecoverPassedEndpointFromCommandLine(
*base::CommandLine::ForCurrentProcess()));
// 取出 Invitation 中的pipe
mojo::ScopedMessagePipeHandle pipe =
invitation.ExtractMessagePipe("my raw pipe");
LOG(INFO) << "pipe: " << pipe->value();
这样就实现了将pipe中的一个handle发送到其他进程了,这两个进程可以开始使用pipe进行收发数据了。
以上只是将handle从一个进程发送到另一个进程的一种方法,这种方法一般用在新进程创建的时候,如果两个进程已经通过Invitation连接起来了,那么可以通过已经建立起来的MessagePipe来发送新的MessagePipe的handle到接收进程,发送端的代码如下:
const std::string kMessage("MessagePipe\0", 12);
mojo::ScopedMessagePipeHandle client;
mojo::ScopedMessagePipeHandle server;
// 创建一个新的MessagePipe(的一对handle)
// 也可以使用 mojo::MessagePipe 来创建,这两者是一样的
result = mojo::CreateMessagePipe(nullptr, &client, &server);
DCHECK_EQ(result, MOJO_RESULT_OK);
// 使用已经连接起来的pipe将 'client' 发送到对方
result = mojo::WriteMessageRaw(pipe.get(), kMessage.c_str(),
kMessage.length(), &client->value(), 1,
MOJO_WRITE_MESSAGE_FLAG_NONE);
DCHECK_EQ(result, MOJO_RESULT_OK);
// 后面就可以使用servier来和对端通信了
接收端的代码如下:
std::vector<uint8_t> data;
// 用来存储接收到的handle
std::vector<mojo::ScopedHandle> handles;
result = mojo::ReadMessageRaw(pipe.get(), &data, &handles,
MOJO_READ_MESSAGE_FLAG_NONE);
DCHECK_EQ(result, MOJO_RESULT_OK);
// 将接收到的handle转换为MessagePipeHandle
// 后续就可以使用这个handle和对端通信了
mojo::ScopedMessagePipeHandle client =
mojo::ScopedMessagePipeHandle::From(std::move(handles[0]));
以上演示了使用已经建立起来的pipe来发送新的MessageaPipe的handle到其他进程的方法,其实这个handle不仅可以是MessagePipe的handle,也可以是DataPipe或者SharedBuffer或者是系统中的其他handle,比如socket fd,窗口句柄等。Mojo提供了 PlatformHandle 类来包装这些Native的handle,以便这些handle可以使用MessagePipe进行发送。Mojo内部会使用所在系统的相应API来实现handle的复制和发送(在Linux上是sendmsg,在windows上是DuplicateHandle)。
demo 见 demo_mojo_multiple_process.cc 。
Mojo C++ Bindings API
Bindings API 是使用 Mojo 的重点,在项目中会大量使用。
Mojom
Mojo在Binding层中引入了 Mojom 这种IDL语言,用它来定义接口。接口定义文件的后缀一般为 .mojom,一个简单的接口定义如下:
// mojom/test.mojom
// 定义接口所属的"module",在生成的C++代码中对应到命名空间
module demo.mojom;
// 定义一个接口,在C++中对应一个抽象类
interface Test {
// 定义一个Hello方法,该方法没有返回值
Hello(string who);
// 定义一个Hi方法,返回值为string类型
// 返回值会对应到C++中的回调方法
Hi() => (string who);
};
定义好mojom文件后,需要在合适的BUILD.gn文件中添加一下代码,以便在编译时将mojom文件生成源代码文件:
# for mojo
import("//mojo/public/tools/bindings/mojom.gni")
mojom("mojom_test") {
sources = [
"mojom/test.mojom",
]
}
这样定义之后,就可以在其他地方依赖mojom_test这个target了。
生成的代码类似下面这样:
// out/Default/gen/demo/mojom/test.mojom.h
namespace demo {
namespace mojom {
class Test;
// 注意这些重命名,在71版本中大量使用,需要熟悉
// 记住 xxxPtr,xxxPtrInfo,xxxRequest
// 这些命名在最新的版本中已经被改了
using TestPtr = mojo::InterfacePtr<Test>;
using TestPtrInfo = mojo::InterfacePtrInfo<Test>;
using TestRequest = mojo::InterfaceRequest<Test>;
...
// 相应的Associated版本
using TestAssociatedPtr =
mojo::AssociatedInterfacePtr<Test>;
using TestAssociatedPtrInfo =
mojo::AssociatedInterfacePtrInfo<Test>;
using TestAssociatedRequest =
mojo::AssociatedInterfaceRequest<Test>;
class TestProxy;
template <typename ImplRefTraits>
class TestStub;
class TestRequestValidator;
class TestResponseValidator;
// 这个就是生成的接口类了
class Test
: public TestInterfaceBase {
public:
static const char Name_[];
static constexpr uint32_t Version_ = 0;
static constexpr bool PassesAssociatedKinds_ = false;
static constexpr bool HasSyncMethods_ = false;
using Proxy_ = TestProxy;
template <typename ImplRefTraits>
using Stub_ = TestStub<ImplRefTraits>;
using RequestValidator_ = TestRequestValidator;
using ResponseValidator_ = TestResponseValidator;
enum MethodMinVersions : uint32_t {
kHelloMinVersion = 0,
kHiMinVersion = 0,
};
virtual ~Test() {}
// Hello 方法
virtual void Hello(const std::string& who) = 0;
// Hi 方法,返回值是回调形式
using HiCallback = base::OnceCallback<void(const std::string&)>;
virtual void Hi(HiCallback callback) = 0;
};
...
} // namespace mojom
} // namespace demo
Bindings
可以看到Hello方法和Hi方法都是纯虚函数,需要自己实现具体的功能,我们简单实现一下这个Test接口:
class TestImpl : public demo::mojom::Test {
public:
void Hello(const std::string& who) override {
who_ = who;
LOG(INFO) << "Test1 run: Hello " << who_;
}
void Hi(HiCallback callback) override {
LOG(INFO) << "Test1 run: Hi " << who_;
std::move(callback).Run(who_);
}
private:
std::string who_;
};
可以看到,实现一个Mojo接口类和实现一个普通的C++接口并没有什么区别,接下来就是使用这个类了。
Mojo接口的使用是依赖MessagePipe的,我们知道一个MessagePipe有一对handle,这一对handle套到接口类中就是一个handle对应Test接口,一个handle对应Test的实现(的一个实例)。MessagePipe和Interface的关系如下图:
要使用一个接口必须有一个MessagePipe,我们可以创建一个MessagePipe,就像下面这样:
// 这些是mojo生成的,放到这里方面理解
using TestPtr = mojo::InterfacePtr<Test>;
using TestPtrInfo = mojo::InterfacePtrInfo<Test>;
using TestRequest = mojo::InterfaceRequest<Test>;
// 创建一个MessagePipe
mojo::MessagePipe pipe;
// 创建 TestPtr,TestPtr见mojo生成的代码
// 把 pipe 的handle0传给了TestPtr
// 下面的写法也可以分两步写:
// demo::mojom::TestPtr test;
// test.Bind(...)
demo::mojom::TestPtr test(demo::mojom::TestPtrInfo(std::move(pipe.handle0),0));
// 接下来就可以调用Test接口提供的方法了
// 这些调用会被序列化后使用handle0发送出去
test->Hello("World!");
test->Hi(base::BindOnce([](const std::string& who) {
LOG(INFO) << "Test1 response: Hi " << who;
}));
// 使用一个Test接口的实例和pipe的handle1构造一个Binding对象
// 上面的Hello和Hi的调用会被mojo转发到这个对象中
// 这些代码可以放在接口调用之后进行,因为mojo会缓存之前的调用
// 只要TestImpl对象和Binding对象不被销毁,对Test接口的调用就会正常进行
TestImpl test_impl;
mojo::Binding<demo::mojom::Test> test(&test_impl,
demo::mojom::TestRequest(std::move(pipe.handle1)));
以上是在单进程中使用Mojo接口的方法,如果把handle1发送到其他进程,则可以实现跨进程调用远程接口了。
在实际使用中,经常把Binding对象放到接口的实现类中,像下面这样:
class TestImpl : public demo::mojom::Test {
public:
TestImpl(demo::mojom::TestRequest request)
: binding_(this,std::move(request)) {
void Hello(const std::string& who) override {
who_ = who;
LOG(INFO) << "Test1 run: Hello " << who_;
}
void Hi(HiCallback callback) override {
LOG(INFO) << "Test1 run: Hi " << who_;
std::move(callback).Run(who_);
}
private:
std::string who_;
mojo::Binding<demo::mojom::Test> binding_;
};
在使用的时候就可以比较简单的使用:
auto TestImpl = new TestImpl(demo::mojom::TestRequest(std::move(pipe.handle1)))
只要保证这个对象不被销毁,则接口都可以正常调用。
Mojo接口的参数不仅可以是简单类型,也可以是handle类型的,也就是说可以使用Mojo接口来传递MojoHandle,这在demo中有演示,详见 demo_mojo_multiple_process_binding.cc 。
mojo::BindingSet
以上是Binding的基本使用,一个接口的调用实际需要有一个MessagePipe支撑,那如果我想在多个地方调用同一个接口怎么办呢?
根据接口是否有状态(也就是对接口的调用会改变接口的实现对象,Test接口就是有状态的,因为Hello的调用会更新who_属性)有不同的方法:
- 接口有状态: 每次需要调用的时候都重新走一遍以上流程;
- 接口无状态: 让TestPtr全局可访问,所有对Test接口的调用都使用同一个TestPtr对象,或者使用mojo::BindingSet,它允许一个TestImpl实例接收来自多个TestPtr的调用。
mojo::BindingSet 的使用非常简单,只要把mojo::Binding替换为mojo::BindingSet,需要Binding的时候调用BindingSet的AddBinding方法即可。
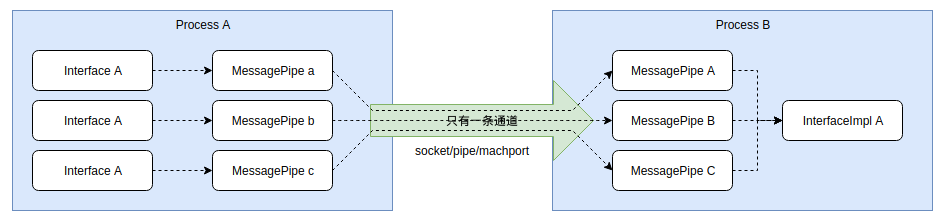
使用BindingSet时接口和MessagePipe的关系如下,可以看到接收端只需要一个接口实例即可服务于多个接口调用。
Associated Interface
每一个 Binding 层中的接口(的实例)都唯一对应一个 MessagePipe,不能在同一个MessagePipe中使用两个接口,如果必须要在同一个MessagePipe中使用多个接口(因为这样可以保证顺序),则需要使用Associated Interface,这种关联接口可以用于多个接口之间有调用顺序依赖的情况,它和普通的Interface的关系如下:
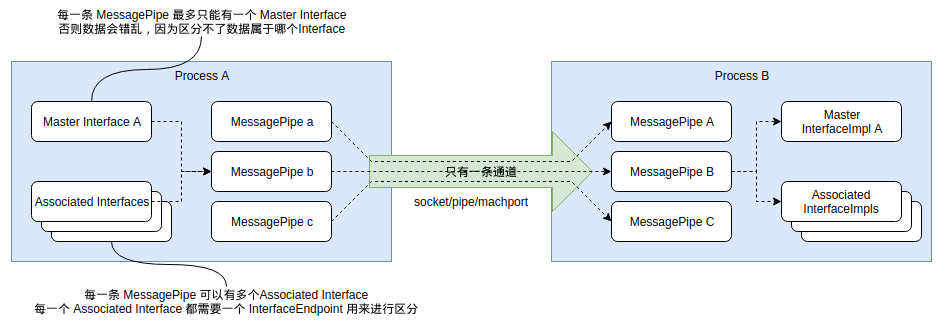
这里的MasterInterface就是前文所述的接口,可以看到Master Interface和多个Associated Interfaces共用一个MessagePipe。
要使用关联接口需要修改接口可以使用在定义接口时使用associated关键字:
// mojom/test3.mojom
interface Api {
PrintApi(string data);
};
interface Api2 {
PrintApi2(string data);
};
// Test3 依赖 Api 和 Api2 接口,不使用关联接口
interface Test3 {
GetApi(Api& api);
SetApi2(Api2 api2);
};
// Test3 依赖 Api 和 Api2 接口,使用关联接口
interface Test32 {
GetApi(associated Api& api);
SetApi2(associated Api2 api2);
};
具体的使用方法这里不再赘述了,详见 demo_mojo_multiple_process_binding.cc 。
mojo::MakeRequest
mojo::MakeRequest()可以简化MessagePipe的创建,只是一个非常简单的包装而已:
// 创建新的MessagePipe用于Api接口的调用
mojo::MessagePipe api_pipe;
Remote<Api> api(PendingRemote<Api>(std::move(api_pipe.handle0),0));
test3->GetApi(PendingReceiver<Api>(std::move(api_pipe.handle1)));
//以上代码可以简化为:
Remote<Api> api;
test3->GetApi(mojo::MakeRequest(&api));
// 使用MakeRequest结果和上面一样,可以更简单,在更新的版本中Remote中添加了BindNew*方法,用来取代MakeRequest
新版本改动
在Chromium的新版本中,所有的xxxPtr,xxxPtrInfo等类都进行了改名,简单来讲新旧版本的类名的对应关系如下:
// 在新版本中这些类被重命名,这里模拟新版本
template<class T> using Remote = mojo::InterfacePtr<T>;
template<class T> using PendingRemote = mojo::InterfacePtrInfo<T>;
template<class T> using Receiver = mojo::Binding<T>;
template<class T> using PendingReceiver = mojo::InterfaceRequest<T>;
// 以下定义用于模拟新版本的关联接口
template<class T> using AssociatedRemote = mojo::AssociatedInterfacePtr<T>;
template<class T> using PendingAssociatedRemote = mojo::AssociatedInterfacePtrInfo<T>;
template<class T> using AssociatedReceiver = mojo::AssociatedBinding<T>;
template<class T> using PendingAssociatedReceiver = mojo::AssociatedInterfaceRequest<T>;
还有一些改动这里不再赘述,具体可以查看 Mojo & The Naming of Things - Google Docs。
Mojo Services
一个Service通过提供一个或多个Mojo接口来暴露一套服务,一个服务可以通过Connector来调用其他的服务,但并不是所有的服务之间都可以随意调用,而是通过Service Manager来管理多个 Service 间的依赖关系,只有明确表示有依赖关系的服务才能够被调用,而依赖关系则是通过Manifest来定义的,所有的这些Manifest组合在一起称为一个Catalog。
这套机制的实现使用 Mojom 定义接口,其中最重要的是 service_manager, service, connector。
下图展示了Service A 和 Service B通过定义Manifest依赖,使用Connector相互调用的示意图:
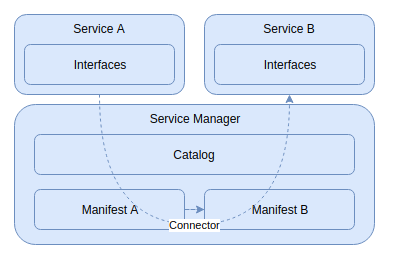
当Service A要调用Serivce B提供的接口的时候,通过自己的Connector对象向ServiceManager发起接口Binding请求,Service Manager会收到这个请求,然后根据已经注册的Manifest依赖关系,验证Service A是否声明了对Service B的依赖,如果是,则Service Manager会检查Service B是否已经存在,如果已经存在,则使用Serivce B,否则启动一个新的Service B实例,这个实例可能运行在一个独立的进程中,这样Service A就获得了由Service B提供的一个Mojo接口。
需要注意的是,Services是多进程架构,以上的Service A,Service B以及Service Mananger 都可以运行在独立的进程中。Service Manager 所在的进程称为 Borker 进程。为了方便用户使用该多进程架构,Services模块提供了一套创建新的可执行程序的框架,目前 Chromium 的启动就使用了该框架,该框架内部会进行一些常用功能的初始化,比如日志,崩溃时的handler,CommandLine,mojo,Tracker/Trace,LANG等,其中最重要的是process_type,默认情况下进程是Embedder类型的,在Chromium中只使用了这个类型。详细信息可以查看 services/service_manager/embedder/main.cc。
service_manager::Main()
service_manager::Main()可以帮助我们初始化很多有用的模块,使用方法如下:
#include "base/at_exit.h"
// For services
#include "services/service_manager/embedder/main.h"
#include "services/service_manager/embedder/main_delegate.h"
// 需要先实现一个MainDelegate
class DemoServerManagerMainDelegate : public service_manager::MainDelegate {
public:
DemoServerManagerMainDelegate() {}
// 默认情况下ServiceManager最终会调到这里,将控制权交给用户自己的代码
int RunEmbedderProcess() override {
// 自定义进程的行为
...
}
};
int main(int argc, const char** argv) {
// process_type 为 Service 的进程不会初始化这个
// 应该是Chromium的bug,因为Chromium中没有使用Service类型的进程
base::AtExitManager at_exit;
DemoServerManagerMainDelegate delegate;
service_manager::MainParams main_params(&delegate);
main_params.argc = argc;
main_params.argv = argv;
return service_manager::Main(main_params);
}
注意: 要是用Services,并不是一定非要使用以上的启动逻辑,只是以上启动逻辑会帮忙初始化很多有用的模块,用起来比较简单罢了。
创建一个Service
Service一般都要提供一些能力Capacity给其他Service使用,这些Capacity是以Mojo接口的形式提供的,因此,要创建Service,需要先定义Mojo接口:
定义一个TestInterface接口:
module demo.mojom;
interface TestInterface {
Hello(string who);
};
实现该接口:
// 在新版本中这些类被重命名,这里模拟新版本
template <class T>
using Remote = mojo::InterfacePtr<T>;
template <class T>
using PendingRemote = mojo::InterfacePtrInfo<T>;
template <class T>
using Receiver = mojo::Binding<T>;
template <class T>
using PendingReceiver = mojo::InterfaceRequest<T>;
class TestInterfaceImpl : public demo::mojom::TestInterface {
public:
TestInterfaceImpl(PendingReceiver<TestInterface> receiver)
: receiver_(this, std::move(receiver)) {}
void Hello(const std::string& who) {
LOG(INFO) << "TestInterfaceImpl run: Hello " << who;
}
private:
Receiver<demo::mojom::TestInterface> receiver_;
};
实现一个Service:
// 这里故意把Service的实现和接口的实现分开,方便演示
class TestService : public service_manager::Service {
public:
void OnStart() override {
LOG(INFO) << "TestService Start.";
// 演示从一个服务内请求其它服务提供的接口
Remote<RootInterface> root;
context()->connector()->BindInterface("consumer_service",
mojo::MakeRequest(&root));
root->Hi("TestService");
}
// 当其他服务调用connector->Connect()时会触发这里
void OnBindInterface(const service_manager::BindSourceInfo& source,
const std::string& interface_name,
mojo::ScopedMessagePipeHandle interface_pipe) override {
LOG(INFO) << "OnBindInterface: " << interface_name;
// 这里可以使用BinderRegistry来简化
if (interface_name == TestInterface::Name_) {
test_interface_.reset(new TestInterfaceImpl(
PendingReceiver<TestInterface>(std::move(interface_pipe))));
}
}
private:
std::unique_ptr<TestInterfaceImpl> test_interface_;
};
Servcie 要定义自己的Manifest来描述自己提供的能力以及以来的其他Servcies,Manifest由一个json文件描述:
// mojom/test_servcie_manifest.json
{
"name": "test_service",
"display_name": "Test Service",
"interface_provider_specs": {
"service_manager:connector": {
"provides": {
"test": ["demo.mojom.TestInterface"]
},
"requires": {
"consumer_service":["root"]
}
}
}
}
这里可以看到,我们的服务名字为test_servcie,它通过demo.mojom.TestInterface提供了test能力,并且依赖consumer_service服务的root能力。
接下里需要在BUILD.gn文件中,将该json定义的Manifest生成代码可访问的Catalog,在BUILD.gn中添加以下内容:
import("//services/catalog/public/tools/catalog.gni")
import("//services/service_manager/public/cpp/service.gni")
import("//services/service_manager/public/service_manifest.gni")
service_manifest("test_service_manifest") {
name = "test_service"
source = "mojom/test_service_manifest.json"
}
service_manifest("consumer_service_manifest") {
name = "consumer_service"
source = "mojom/consumer_service_manifest.json"
}
catalog("test_service_catalog") {
embedded_services = [
":test_service_manifest",
":consumer_service_manifest"
]
}
# 这会生成一个名为 demo::services::CreateTestServiceCatalog() 的全局方法
catalog_cpp_source("test_service_catalog_source") {
catalog = ":test_service_catalog"
generated_function_name = "demo::services::CreateTestServiceCatalog"
}
现在万事具备,可以创建ServiceManager了,注意这里调用了自动生成的demo::services::CreateTestServiceCatalog()方法,相当于在ServiceManager中注册了这种服务:
service_manager::BackgroundServiceManager service_manager(
&service_process_launcher_delegate,
demo::services::CreateTestServiceCatalog());
有了ServiceManager就可以启动服务了:
// 可以使用以下方式手动启动一个Service
service_manager.StartService(service_manager::Identity("test_service"));
这样启动后,service_manager检测到test_service不存在,所以就在新进程中启动一个test_service服务,在新进程中test_service的OnStart方法就会被调用,test_service在OnStart方法中就可以使用Connector去请求consumer_service提供的root能力了。
class TestService : public service_manager::Service {
...
void OnStart() override {
LOG(INFO) << "TestService Start.";
// 演示从一个服务内请求其它服务提供的接口
Remote<RootInterface> root;
context()->connector()->BindInterface("consumer_service",mojo::MakeRequest(&root));
root->Hi("TestService");
}
...
};
至此,Service的整条流程也走完了,这里省略了一些逻辑,还有一些其他用法也不赘述了,具体请查看 demo_services.cc 。
其他
Services 的代码位于Chromium中的 //services 目录下,需要说明的是,services 并不是完全独立的,它是和Chromium紧密相关的,内部存放了大量的Chromium相关的service,比如device,audio等,因此如果想像Mojo那样在其他和Chromium无关的项目中使用可能会比较麻烦。
demo 见 demo_services.cc 。
Legacy Chrome IPC
再次强调这种机制是被废弃的,但是因为Chromium非常核心的逻辑依然遗留有大量对它的使用,所以大家目前还是要理解这种用法。下图这张经典的图可以比较好的说明Chromium中是如何使用Legacy IPC的:
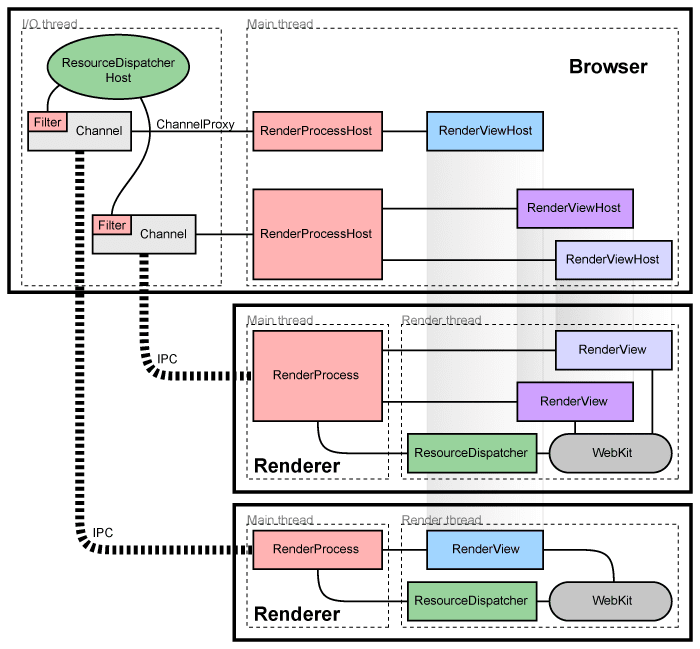
我们可以看到以下和Legacy IPC相关的信息:
- Browser进程有2个Channel,说明一个进程中可以有多个Channel;
- 每个Render进程都有一条Legacy IPC和Browser连接;
- ResourceDispatcher 通过Filter和Channel连接起来;
这里先介绍几个Legacy IPC的关键术语:
IPC::Channel: 一条数据传输通道,提供了数据的发送和接收接口;IPC::Message: 在Channel中传输的数据,主要通过宏来定义新的Message;IPC::Listener: 提供接收消息的回调,创建Channel的必须提供一个Listener;IPC::Sender: 提供发送IPC::Message的Send方法,IPC::Channel就实现了IPC::Sender接口;IPC::MessageFilter: 也就是Filter,用来对消息进行过滤,类似管道的机制,它所能过滤的消息必须由其他Filter或者Listener传给它;IPC::MessageRouter: 一个用来处理Routed Message的类(见下文);
Legacy IPC的本质就是通过IPC::Channel接口发送IPC::Message,IPC::Channel是封装好的类,IPC::Message需要用户自己定义,所以接下来我们先来看一下如何定义Message。
Messages
IPC::Message 有两类,一类是路由消息 “routed message”,一类是控制消息 “control message”,他们从消息内容上看唯一的不同就是routing_id() 不同,每一个IPC::Message都会有一个routing_id,控制消息的routing_id始终是MSG_ROUTING_CONTROL,这是一个常量,除此之外,所有routing_id不是这个常量的消息都是路由消息。这两种消息在处理上也没有什么不同,唯一区别对待它们的地方就在IPC::MessageRouter类中,或者自己写代码进行区分。
定义一个消息的方法如下:
// demo_ipc_messages.h
#ifndef DEMO_IPC_MESSAGES_H_
#define DEMO_IPC_MESSAGES_H_
#include "ipc/ipc_message.h"
#include "ipc/ipc_message_macros.h"
#include "ipc/ipc_param_traits.h"
// 使用 IPCTestMsgStart 来测试,它不能随意命名,必须存在于 ipc/ipc_message_start.h 中
// 详情见 ipc/ipc_message_macros.h 文件头的解释
#define IPC_MESSAGE_START IPCTestMsgStart
// 定义2个控制消息,宏后面的1表示有1个参数
IPC_MESSAGE_CONTROL1(IPCTestMsg_Hello,std::string)
IPC_MESSAGE_CONTROL1(IPCTestMsg_Hi,std::string)
// 定义2个路由消息,宏后面的1表示有1个参数
IPC_MESSAGE_ROUTED1(IPCTestMsg_RoutedHello,std::string)
IPC_MESSAGE_ROUTED1(IPCTestMsg_RoutedHi,std::string)
#endif //DEMO_IPC_MESSAGES_H_
这里面有一个“魔数”IPCTestMsgStart,这个是不能随便命名的,可以认为它是用来给消息分类的,消息必须属于某一个类,所有的类别可以在 ipc/ipc_message_start.h 中查看。
这样定义了之后还不能使用,还要按照添加所谓的message generator,具体内容见demo_ipc_message_generator.h和demo_ipc_message_generator.cc。
这样之后Message就算定义好了,就可以进行发送了。要发送Message,需要创建IPC::Channel,但是在创建IPC::Channel的时候需要传入一个IPC::Listener用来接收IPC::Channel受到的Message,所以我们先来实现一个IPC::Listener。
IPC::Listener
IPC::Listener 接口非常简单,最主要的是重写OnMessageReceived方法,这个方法会被IPC::Channel调用,在这个方法内部使用IPC_BEGIN_MESSAGE_MAP宏来进行消息的分发,这个宏可以处理控制消息也可以处理路由消息。当IPC::Channel收到 IPCTestMsg_Hi消息的时候就会触发OnHi方法。
class ProducerListener : public IPC::Listener {
private:
void OnChannelConnected(int32_t peer_pid) override {
LOG(INFO) << "Producer OnChannelConnected: peer_pid= "<<peer_pid;
}
bool OnMessageReceived(const IPC::Message& message) override {
bool handled = true;
IPC_BEGIN_MESSAGE_MAP(ProducerListener, message)
IPC_MESSAGE_HANDLER(IPCTestMsg_Hi,OnHi);
IPC_MESSAGE_UNHANDLED(handled = false);
IPC_END_MESSAGE_MAP()
LOG(INFO) << "Producer OnMessageReceived: handled= " << handled;
return handled;
}
void OnHi(const std::string& who) {
LOG(INFO) << "ProducerListener run: Hi " << who;
}
};
IPC::Channel
前面有提到过,当前的Legacy IPC的底层是使用Mojo(的MessagePipe)实现的,因此要在多进程下使用Legacy IPC,肯定也要涉及MessagePipe的创建,以及进程间MessagePipe的传递,所以我们基于demo_mojo_multiple_process来实现Legacy IPC的demo。
创建IPC::Channel的方法如下:
// 假设我们已经通过某种方法获得了一个MessagePipe的句柄
mojo::ScopedMessagePipeHandle pipe = ...;
ProducerListener listener;
// 创建一个Server端的Channel,在底层使用Mojo的情况下Server和Client是等价的
std::unique_ptr<IPC::Channel> ipc_channel =
IPC::Channel::CreateServer(pipe.release(),&listener,xxx.task_runner());
LOG(INFO) << "Producer Connect";
bool result = ipc_channel->Connect();
if(result) {
// 发送消息
ipc_channel->Send(new IPCTestMsg_Hello("Producer"));
ipc_channel->Send(new IPCTestMsg_RoutedHello(1,"Producer"));
}
在接收端可以使用同样的方法创建一个IPC::Channel。这样两端就可以通过IPC::Channel接口进行Message的收发了。
可以看到,这里完全可以不使用任何的IPC::MessageFilter或者IPC::MessageRouter,这些都不是使用Legacy IPC所必须的,如果你的Listener需要提供Message分发的能力,你可以在自己的Listener中使用这些类。在demo中有演示他们的使用方法,详见 demo_ipc.cc。
IPC::Channel 的接口并不复杂,之所以在Chromium中显的比较复杂,是因为Chromium对它进行了太多层的包装,这些都是业务的复杂性,并不是Legacy IPC接口的复杂。
总结
以上是Chromium中的所用到的绝大部分IPC机制(还有些由base库提供),希望大家在了解了这些IPC的运行机制之后可以对Chromium的多进程架构及服务化架构有更深的理解。
也希望大家能一起研究Chromium中的基础技术,看到Chromium复杂的业务逻辑背后有趣的设计。
参考文档:
- Mojo docs (go/mojo-docs) - Mojo
- Mojo docs (go/mojo-docs) - Mojo Basics
- Mojo docs (go/mojo-docs) - Mojom Interface Definition Language (IDL)
- Mojo docs (go/mojo-docs) - Mojo C++ Bindings API
- Mojo Style Guide
- Converting Legacy IPC to Mojo
- Intro to Mojo & Services
- Mojo & Servicification Performance Notes - Google Docs
- Mojo Bindings Conversion Cheatsheet - Google Docs
- Mojo & The Naming of Things - Google Docs
- Mojo Associated Interfaces - Google Docs
- Servicifying Chromium Features
- core - Source
- Is the "Intro to Mojo & Services" documentation up to date - Google Groups
- Super Simple Services - Google Docs
- Inter-process Communication (IPC) - The Chromium Projects
- Multi-process Architecture - The Chromium Projects